Stepper motors
General information on stepper motors
Stepper
motors are special versions of the synchronous machine, in which the rotor is a
permanent magnet, while the stator consists of a coil package. In contrast to
synchronous motors, stepper motors have a large number of pole pairs. Motor
operation requires a control unit, which energises the individual motor
windings based on a certain pulse sequence. A stepper motor has a tendency to
mechanical oscillation. Above its load limit it loses dynamic characteristics
and may lose individual steps. Under high load the shaft may even stop. Safe
positioning is therefore only guaranteed within the performance limits. If the
motor is operated within its load limits, positioning without feedback of the
rotor position can be achieved by linking individual steps. This operating mode
(open loop control) and the durability of the stepper motor enable it to be
used as a positioning drive in price-sensitive applications.
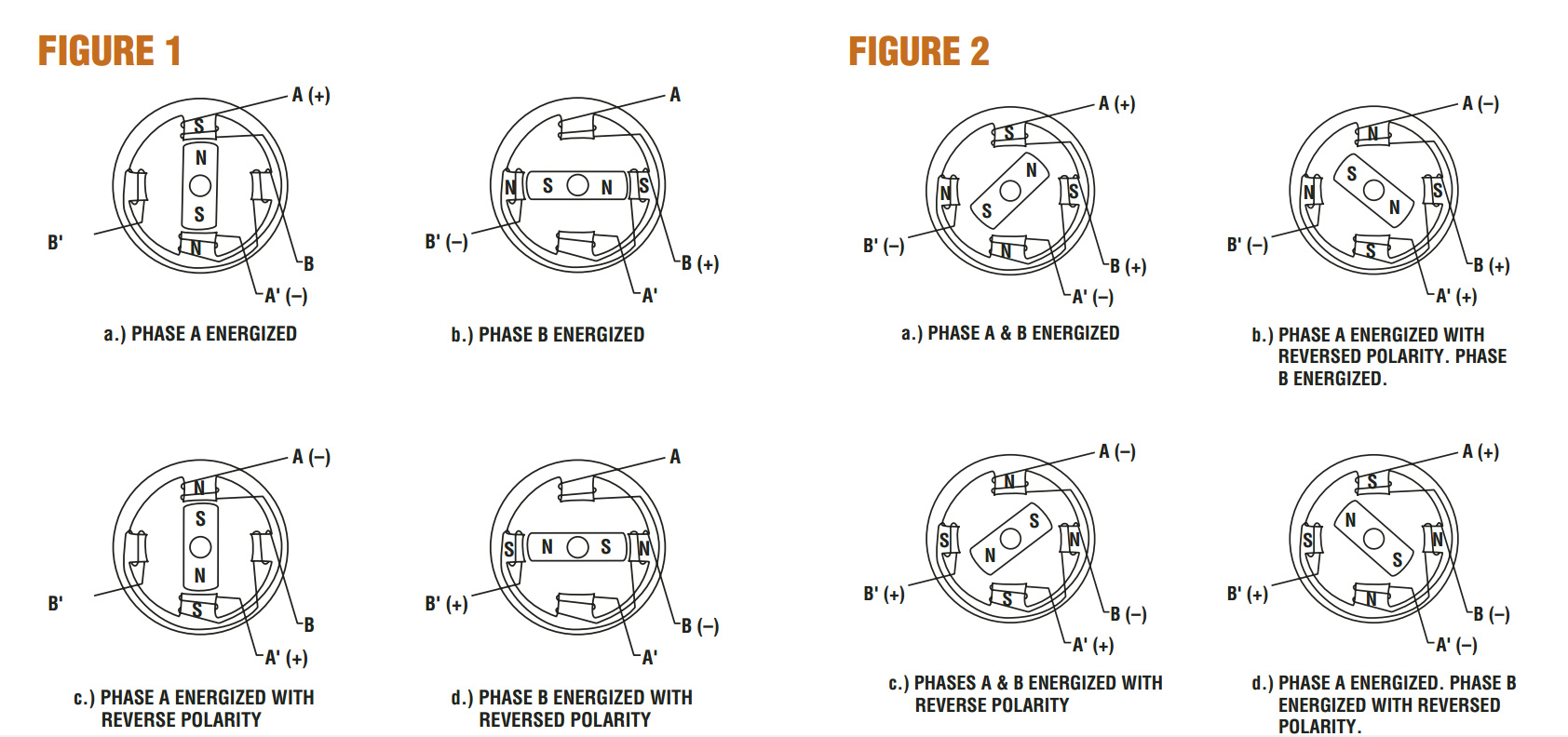
Basic function principles of a stepper motor
Like most electric motors, a stepper motor consists of a stator (fixed external winding) and a rotor (rotating shaft with magnets).
The rotation of the motor shaft (rotor) is generated by rapid energising the
electromagnetic field of the stator, causing the shaft to turn by the step
angle a. In a minimum control configuration, the stepper motor is moved from
pole to pole, or from step to step. A full turn of the motor shaft is therefore
made up of individual steps. Energising of the motor windings results in a magnetic field in the motor from north
to south (or south to north if the power supply has negative polarity and the
winding is arranged accordingly). The movable stator with its permanent magnets
aligns itself according to the direction of the external magnetic field of the
stator.
A special type of
synchronous motor which is designed to rotate a specific number of degrees for
every o electric pulse received by its control unit. Typical steps are 7.5 or
15 per pulse. It is a motor that can rotate in both directions, move in precise
angular increments, sustain a holding torque at zero speed, and be controlled
with digital circuits. It moves in accurate angular increments known as steps,
in response to the application of digital pulses to the electric drive circuit.
Generally, such motors are manufactured with steps per
revolution. Step motors are either bipolar, requiring two power sources or uni
polar requiring only one power source.
Θm =2/p*θe
wm =2/p*we
Related Articles
Lesson meta keywords and meta description:
Write a public review